

Space Systems
The Space Systems division builds and launches CubeSats for scientific missions - our main goal is to provide educational opportunities to students in spacecraft design, assembly, testing, operation, mission planning and leadership.
We are passionate about designing systems that test novel designs, address scientific gaps, and help life on Earth improve. Our designs are open-source for other teams to improve on; Our division is fully student-funded by the University of Toronto Students’ Union (UTSU) and the University of Toronto Engineering Society (EngSoc).
UTAT Space Systems is a no-barrier team - we recruit from all engineering disciplines and from other faculties as well, to pull together a wide knowledge base. We believe in giving members ownership of their works, and making sure that our members contribute uniquely to our missions.
Project Overview
FINCH
The Field Imaging Nanosatellite for Crop residue Hyperspectral mapping (FINCH) mission is a 3U CubeSat mission designed to conduct a technological demonstration of crop residue mapping from the Low-Earth Orbit.
The two primary goals for this mission are:
Performing a technological demonstration of the first Volume Phase Holographic (VPH) grism in a small form-factor
Providing a proof of concept for crop residue mapping using hyperspectral short wave infrared
(SWIR) satellite remote sensing
Since 2020, the FINCH mission has gone through its mission scoping and high-level design phase. We are jumping into the detailed design phase now, full of rapid prototyping and proofs-of-concept in all areas of the team. FINCH is aiming to innovate with its novel payload design, and integrating high-performance components in all subsystems to make sure we get the best payload data we can.
FINCH is projected to launch in Q4 2025.
-
2019 - FINCH kickoff - Satellite Idea Competition
2020 - Remote sensing mission profile chosen - Mission scoping begins
April 2021 - High-Level Design begins
August 2021 - Team publishes paper and presents poster on online onboarding strategies for the Small Satellite Conference in Logan, Utah, USA
March 2022 - Detailed Design begins
August 2022 - Team presents scientific mission and payload design at the Small Satellite Conference in Logan, Utah, USA
2025 - Spacebound! FINCH will launch on a rideshare mission.
HERON Mk. II
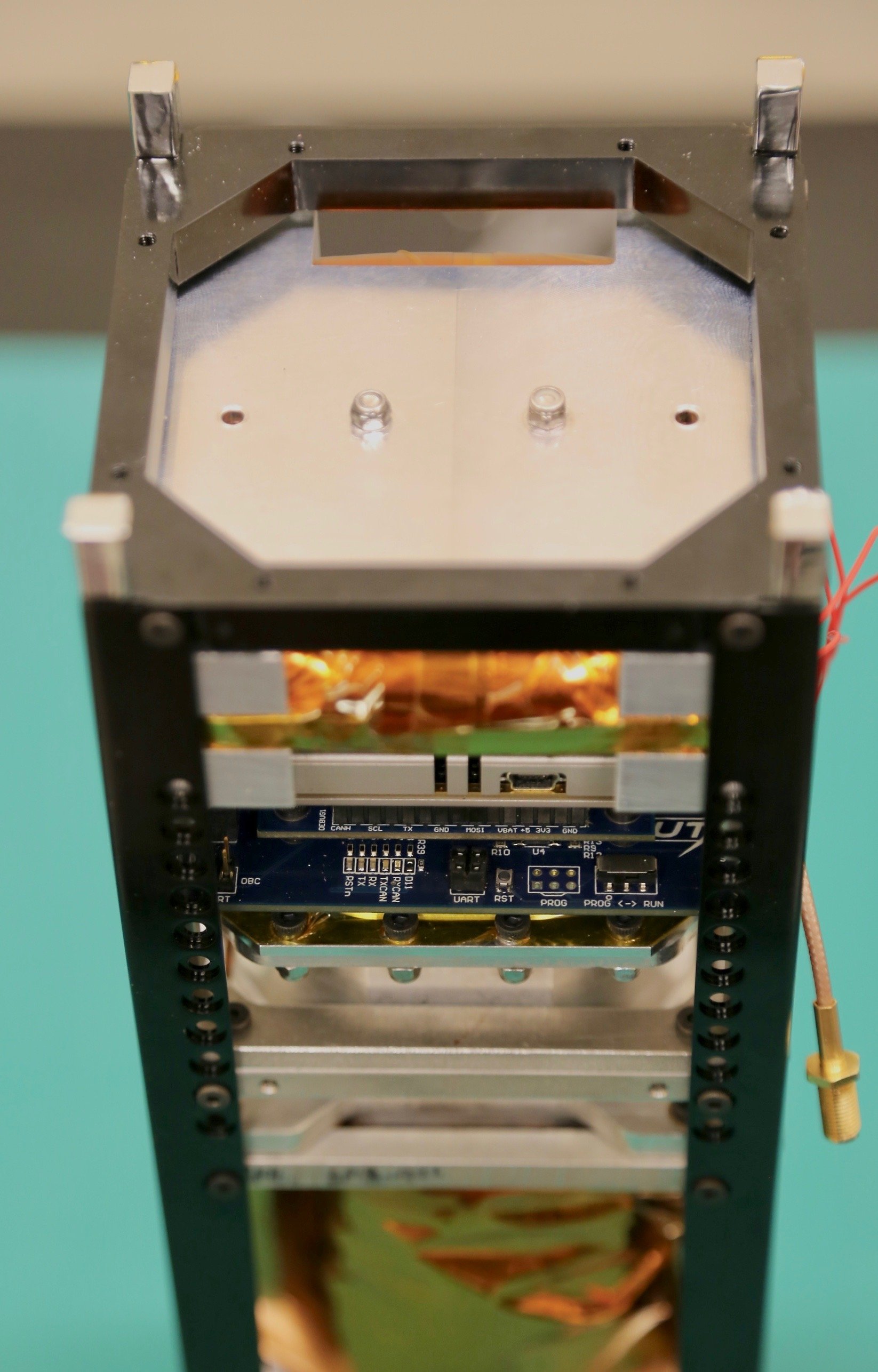
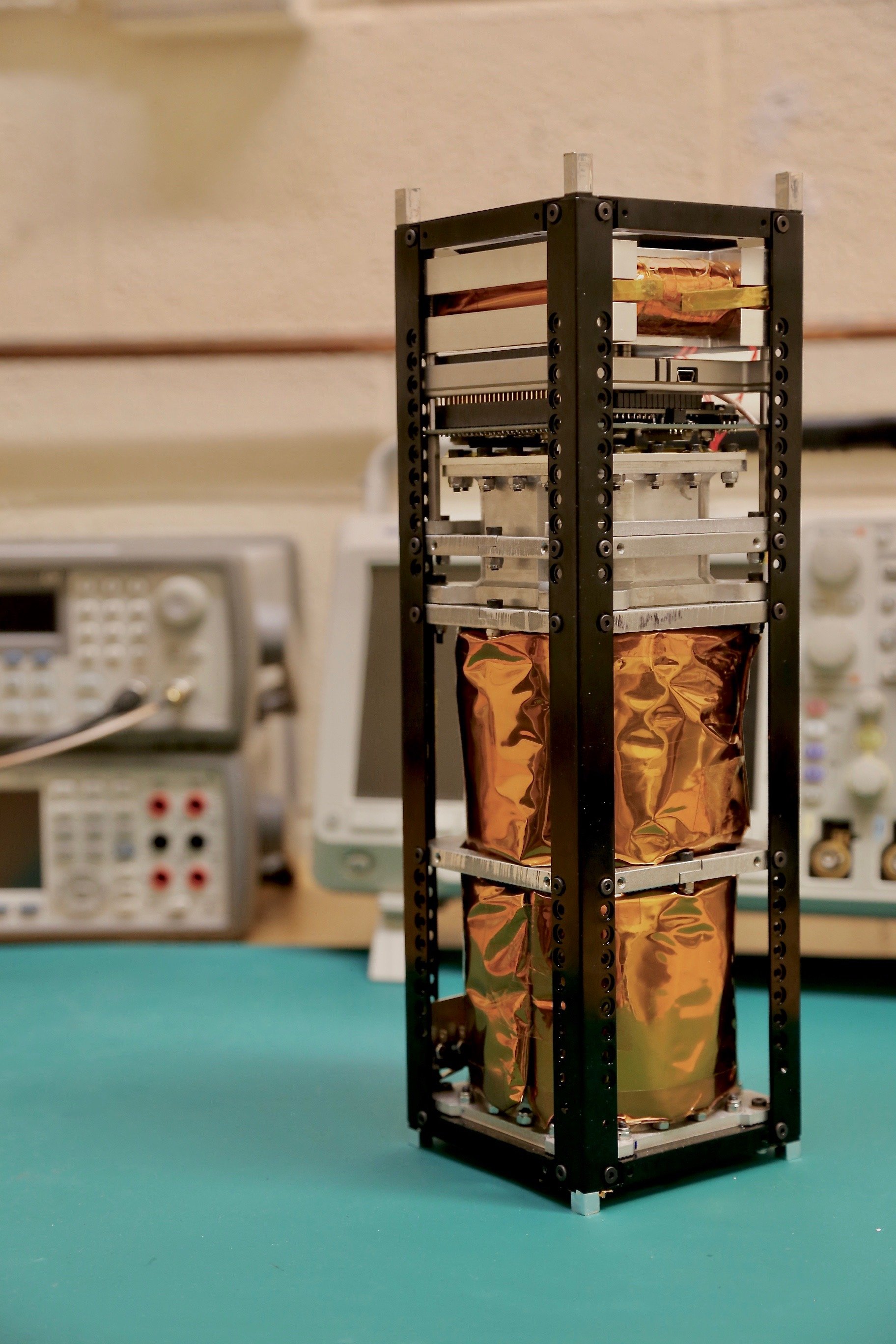
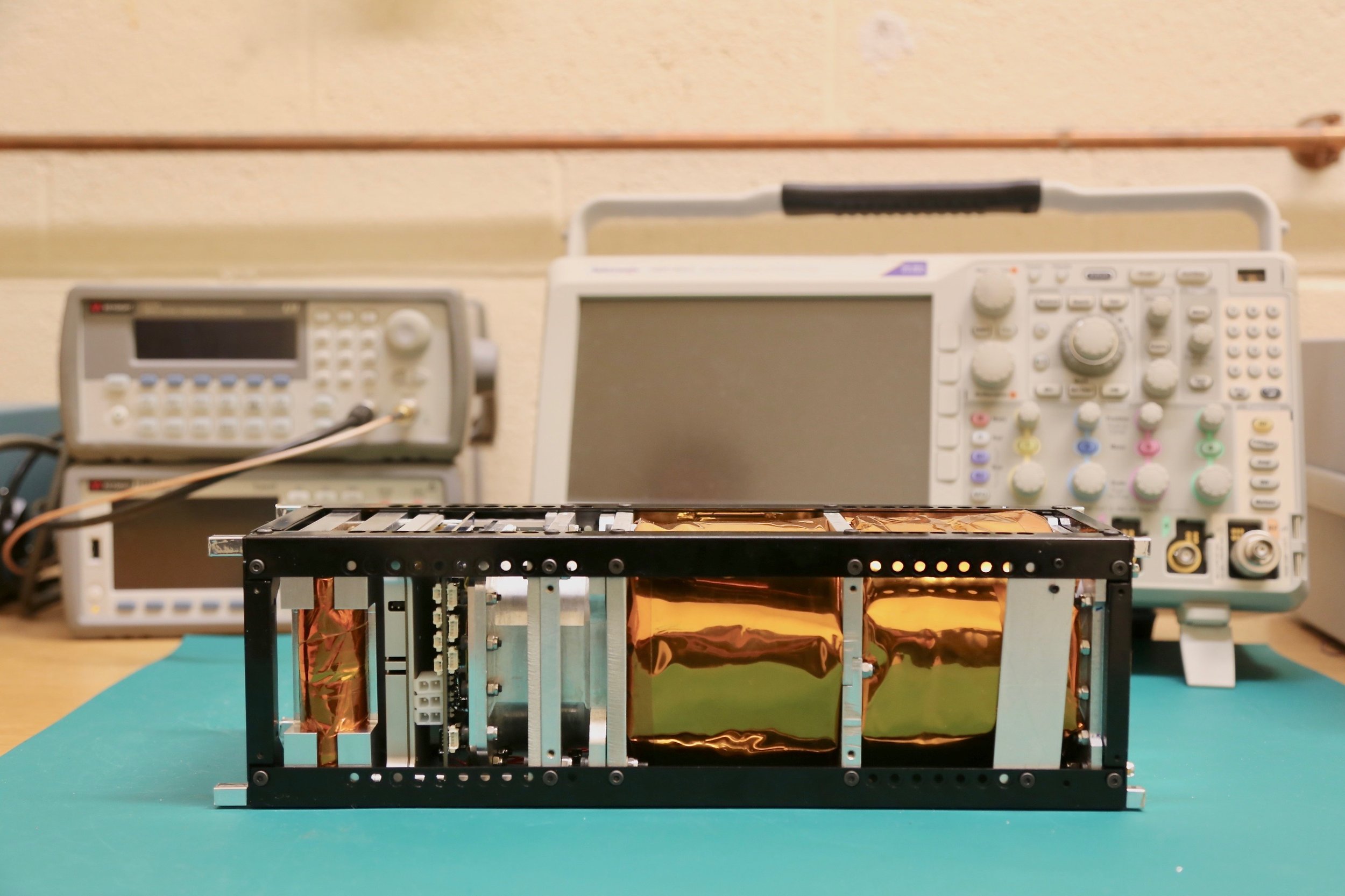
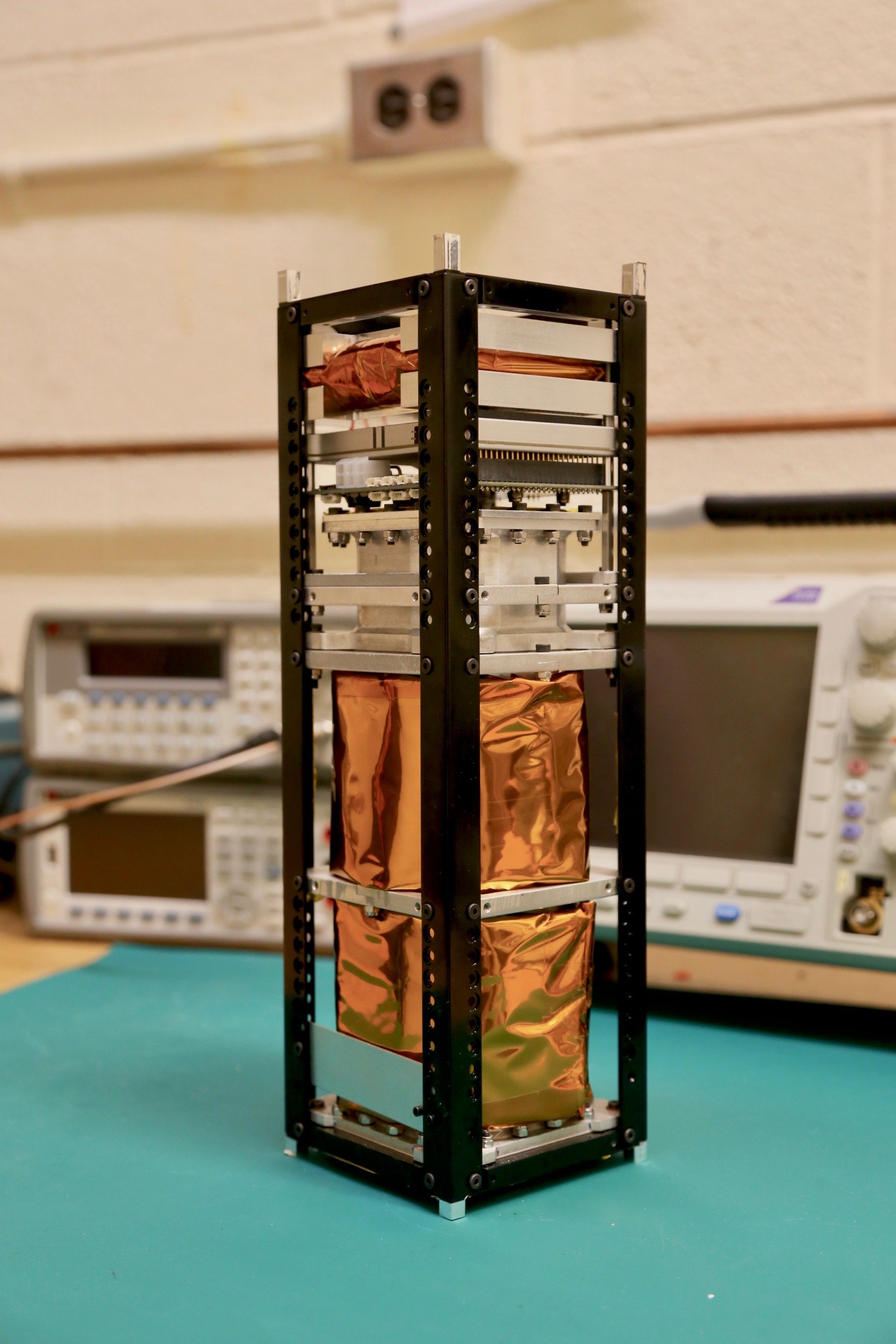
The Space Systems division is proud to present the HERON Mk. II satellite, the first fully student-built and student-funded satellite in Canada.
HERON Mk. II was launched and deployed into Sun-synchronous orbit on November 11th, 2023, during the SpaceX Transporter-9 mission aboard a Falcon 9 rocket.
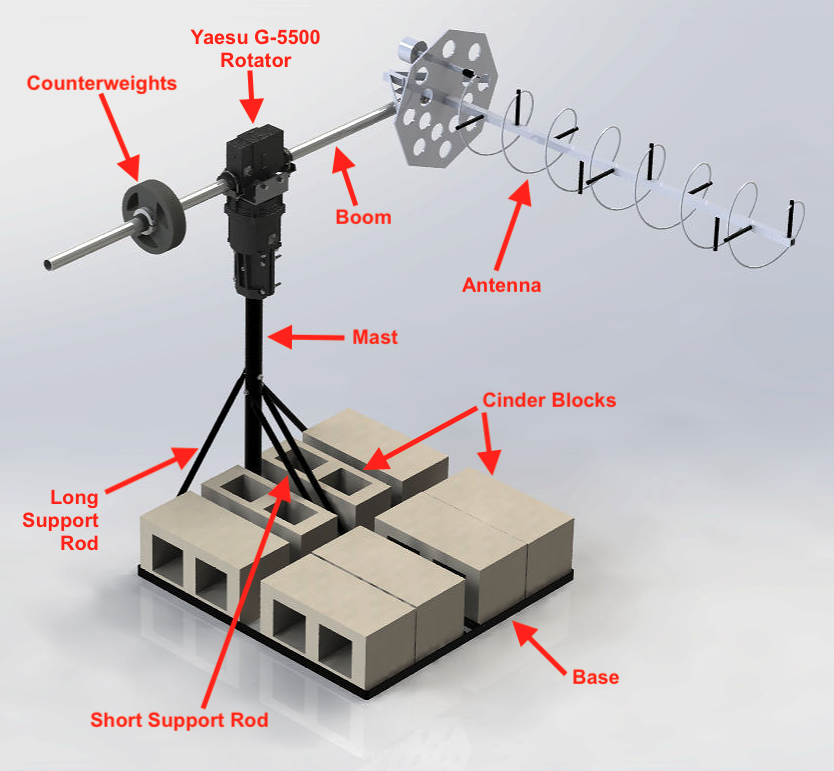
As primarily an educational and self-training mission, there have been many learnings along the way—developing an amateur radio ground station, establishing robust design and testing practices, and much more. As a secondary mission, HERON will validate our open-source electronics and mechanical design.
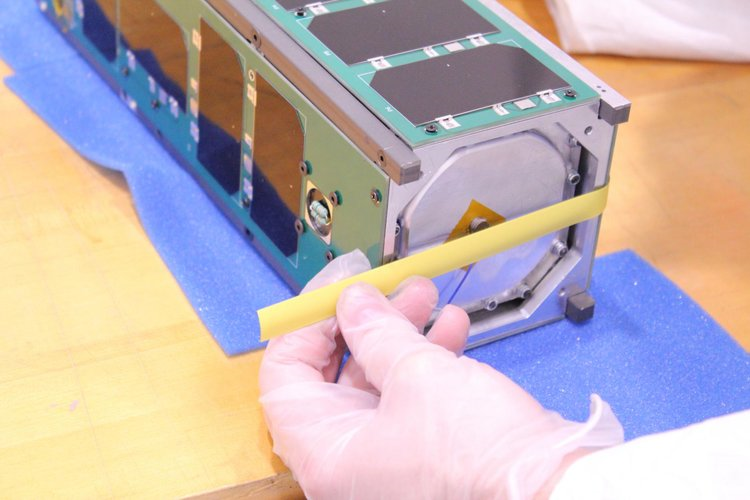
HERON’s mechanical design (MECH) includes a passive magnetic attitude control system, thermal insulation system, and standardized 3U CubeSat structural design. The main electronics design (BUS) includes an electrical power system with solar arrays, UHF band communication system, and on-board computer with custom firmware.
In 2021, the Space Systems division finished the development of the amateur radio satellite HERON in preparation for hand-off and launch. Since 2017, the team has been designing HERON as the team’s first-ever CubeSatellite in the hopes that future satellites and radio amateurs will use and modify our open-source designs.
Currently, the HERON project is focused on the launch and operations phase by coordinating with our launch provider and testing our own ground station. We are looking for members with programming experience, interest/experience in amateur radio communications, and an interest in spacecraft operations.
HERON acts as a WORD on the UHF band and is available to amateur radio operators across the world.
For more details on the satellite project, please consult the link below:
-
2016-2018 - Space Systems designs and builds HERON Mk. II for the 4th edition of the Canadian Satellite Design Challenge.
2017 - Space Systems secures UTSU levy to fund launch of HERON Mk. II.
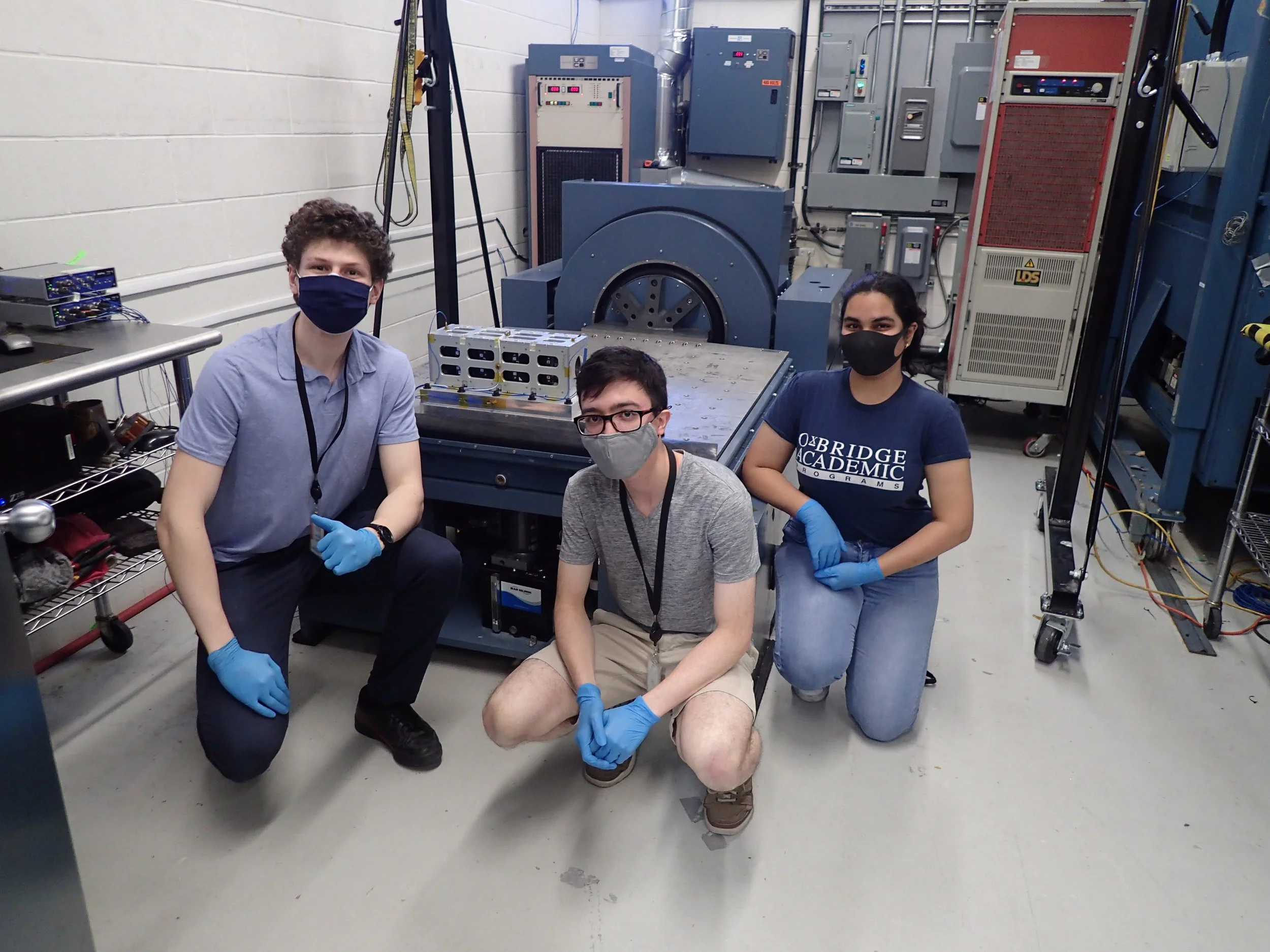
June 2018 - HERON Mk. II vibration testing conducted at DFL as part of CSDC.
2019 - Space Systems succeeds in getting UTSU levy renewed.
Fall 2019 - HERON Mk. II softstack takes place.
February 2020 - HERON Mk. II bakeout and TVAC conducted at MDA in Brampton, Ontario.
2021 - Space Systems succeeds in getting UTSU levy renewed a second time.
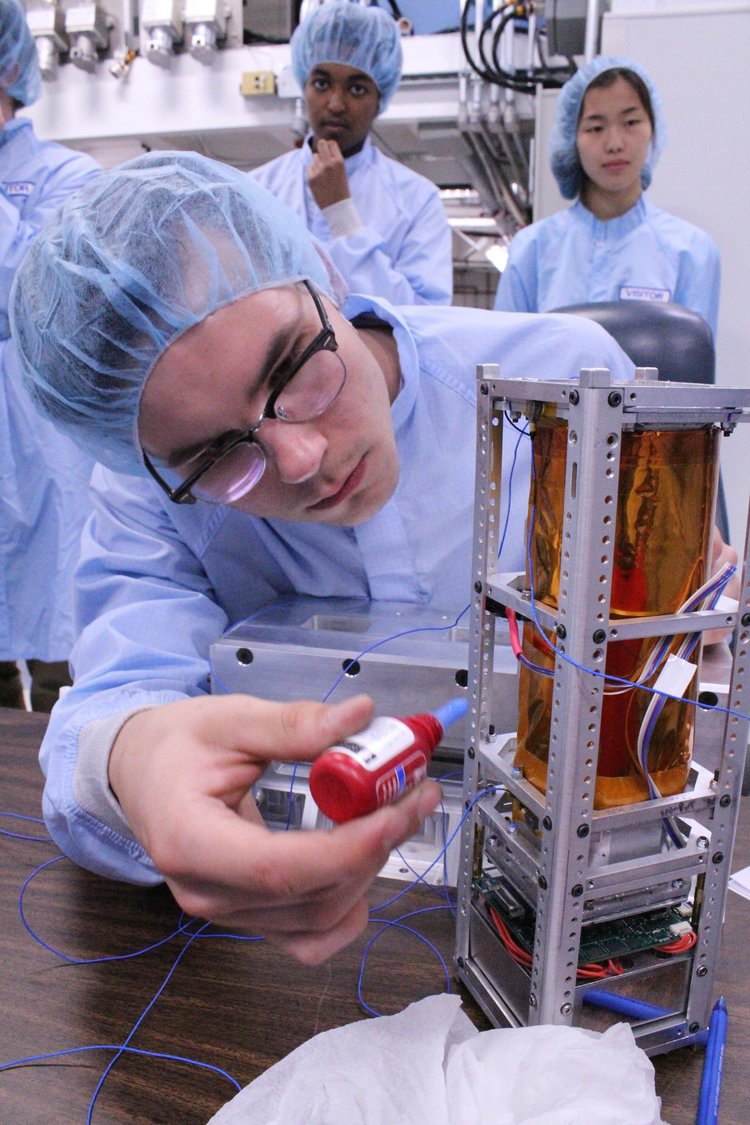
March ~ April 2021 - HERON Mk. II final assembly (hardstack) takes place.
June 2021 - HERON Mk. II flight model vibration testing conducted at NTS in Kitchener, Ontario.
October 2021 - Mission objectives changed to emphasize educational objective, in order to increase team’s experience with amateur radio communications.
Summer 2022 - HERON ground station assembly begins
August 2023 - HERON Mk. II deployer integration in Bellevue, Washington.
November 11th, 2023 - Spacebound! HERON Mk. II launches from Vandenberg Space Force Base on the SpaceX Transporter-9 rideshare mission aboard a Falcon 9 rocket.
HERON Mk. I (Retired)
-
2014-2016 - HERON Mk. I CubeSat developed and constructed
2017 - Poster presentation at NASA AAQ in Huntsville, USA, followed by retirement of the demonstrator
















Why Amateur Radio?
A key educational objective for the HERON Mk. II mission is to provide amateur radio training and amateur satellite operations experience to our members. To this end, we have a training program for UTAT Space Systems members that makes significant use of the Amateur Basic and Advanced content. While this training is primarily for new Communications members, others on the team are welcome to participate. It is our goal that HERON will further the development of the amateur radio community in Toronto and beyond: our designs are publicly available, and amateur operators from around the world will be able to receive telemetry data from HERON as well as use our ground station via the SatNOGS network.
New members learn the basics of RF Communications starting with the knowledge required for Basic licensure, and pass the Amateur Radio exam so they can operate our amateur ground station and help design RF components under the guidance of the Communications lead. Keener members are encouraged to study for the Advanced licensure as this content is what they will learn over the course of the HERON and FINCH missions, and will allow them to further assist with communications in the amateur band using our ground station.
Teams and Sub-teams
FINCH Sub-teams
Systems
The highway that links the team and the FINCH design. Manage design decisions and interfaces (points of connection) across FINCH using systems thinking, and making the assembly and testing plans for the satellite.
Science
Determine the scientific objectives of FINCH, and where and when FINCH will take hyperspectral images. Conduct research on scientific objectives and schedule outreach calls with experts in various fields.
On-orbit Operations
Collective of members from various subsystems together to establish how FINCH will work in space, and how that translates to work for the firmware, power, RF, and payload electronics teams. We look at modes of operations and risk mitigation in space.
Data Processing
Develop code in Python to correct various sources of noise in our data after it’s downlinked from FINCH.
Hardware
Develop the space-grade PCBs that will make FINCH work. From the schematic to board layout and testing, we design and test our boards in-house.
Firmware & CDH (Command & Data Handling)
Write the code that keeps FINCH running. Working at a lower level than the software most people are familiar with, we build fast, reliable interfaces between power, the camera, sensors, actuators, radios, thermal, and more.
RF (Radio Frequency)
Design and test the radio-frequency communications signal chain so we can command FINCH from the ground and pull data from the satellite.
Mechanical
Develop the satellite structure, ensuring everything fits and we follow the launch provider’s mass and volume requirements. Undertake vibration testing to ensure we can withstand the vibrations and forces that come with the launch!
Thermal
Protect FINCH against the crazy thermal loads on orbit and hold each component at optimal temperatures to make the satellite work. Put the satellite through thermal vacuum testing to verify its operations in space!
Payload
Payload is focused on the design of the hyperspectral imaging camera, where the magic happens! It contains the Payload Electronics, Structures, and Optics teams. Recommended for those who want to learn about many satellite functions working together, and contribute to a cutting-edge payload design for scientific and technological research.
ADCS (Attitude Determination and Control Systems)
Responsible for ensuring the spacecraft is pointed in the correct direction at any given time, using a system of sensors, actuators, and algorithms.
Power
Design and test the power generation, storage, and distribution circuits for FINCH.
How to Join
Space Systems accepts new members primarily during the first few weeks of September, January and May. To join during one of these primary onboarding cycles, please fill out the sign-up form linked below:
For any questions, or to join outside of primary onboarding times, please email the Director of Space Systems at spacesys@utat.ca
No applications or resumes are required!
Just let us know what your interests are, and we will help you get onboard during the next recruitment cycle.
See Also
Our Open-Source Work
Check out our brand new Notion workspace! We are currently migrating to Notion, so please be patient as we deploy our documentation constellation.
Our Published Papers
K. Gwozdecky, and S. Dodge. “Alternative Launch Funding for Student Nanosatellite Missions,” in SmallSat, Logan, UT, 2018. [Online]. Available: https://digitalcommons.usu.edu/smallsat/2018/all2018/354/
A. Haydaroglu, R. Howlader, A. N. Mukkala, K. Ren, and E. van Velzen. “Systems Engineering Challenges and Strategies in a Student Satellite Design Team: HERON – A Case Study,” in ISSE, Edinburgh, UK, 2019. [Online]. Available: 10.1109/ISSE46696.2019.8984595
C. Chanen et al. “Inspiring the Next Generation: Challenges and Strategies for Onboarding and Retention in an Undergraduate CubeSat Design Team,” in SmallSat, Logan, UT, 2021. [Online]. Available: https://digitalcommons.usu.edu/smallsat/2021/all2021/17/
A. Miles et al. “FINCH: A Blueprint for Accessible and Scientifically Valuable Remote Sensing Satellite Missions,” in SmallSat, Logan, UT, 2022. [Online]. Available: https://digitalcommons.usu.edu/smallsat/2022/all2022/88/
D. Murdoch et al. “Hot & Cold: The FINCH Thermal Simulator,” in SmallSat, Logan, UT, 2023. [Online]. Available: https://digitalcommons.usu.edu/smallsat/2023/all2023/232/
I. Vyse et al. “Beyond the Visible: Jointly Attending to Spectral and Spatial Dimensions with
HSI-Diffusion for the FINCH Spacecraft,” in SmallSat, Logan, UT, 2024. [Online]. Available: https://digitalcommons.usu.edu/smallsat/2024/all2024/121/
FINCH Leadership
-

Ksenya Narkevich
Director of Space Systems
-

Abeer Fatima
FINCH Systems Design Lead
-

Aidan Armstrong
FINCH Science Lead
-

Iliya Shofman
FINCH Optical Payload Design Lead
-
Ksenya Narkevich
FINCH Payload Mechanical Design Lead
-

Sakeena Qureshi
FINCH Mechanical Design Lead
-

Riann Po
FINCH Thermal Design Lead
-

Ben Bornstein
FINCH ADCS Design Lead
-

Reid Sox-Harris
FINCH Hardware & Electrical Design Lead
-

Sara Zia
FINCH Power Design Lead
-

Liam McGarry
FINCH RF Lead
-

Max Michet
FINCH Mission Operations Lead
-

Kevin Caldwell
FINCH Firmware Design Lead
-

Mirai Shinjo
FINCH Payload Firmware Design Lead
-

Ian Vyse
FINCH Data Processing Lead
-

Rosalind Liang
FINCH Science Advisor
-

Mingde Yin
FINCH Orbit Advisor
HERON Leadership
-
Reid Sox-Harris
HERON Mission Operations Lead
-

Dylan Vogel
HERON Chief Systems Designer
-

Jaden Reimer
HERON Power Design Lead
-

Eric van Velzen
HERON Thermal Design Lead
-

Lorna Lan
HERON Instrumentation Lead
-

Bruno Almeida
HERON Software Lead
-

Avinash Mukkala
HERON Technical Advisor
-

Kimberly Ren
HERON Technical Advisor
Space Systems Portfolios
-

Christina Mai
Space Systems Head of Regulatory
-

Hannah Chua
Space Systems Head of Outreach
-

Riann Po
Space Systems Head of Brand & Media
-
Aleksandr Osokin
Space Systems Head of Finance and Business Development